R: KFAS 1.0.4-1による一部の状態のとりだし [統計]
KFASによる状態空間モデルの解析。生態学会のときはpredict()のstates引数で状態を指定して、過去のデータについて予測をおこなうというふうにしていたのですが、KFAS 1.0.4-1ではpredict()のstatesの指定が有効でないみたい。マニュアルをよく読むと、こういうときはsignal()をつかうほうがよいのかも。
# 生態学会のときのスライドも、いまからみるといろいろ手直ししたいところがありますなあ。
KFS()で平滑化して、signal()のstatesで、状態を指定する。
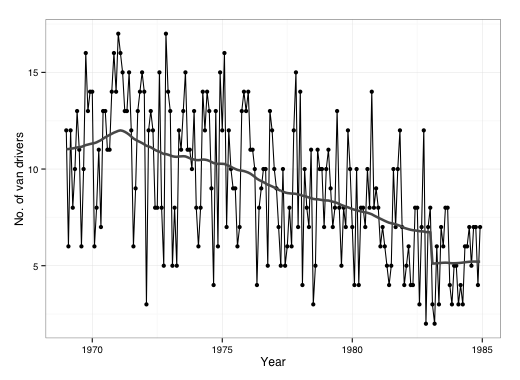
### ### KFASによる、ポアソン分布の状態空間モデルの解析例 ### ### 例題は、help(KFAS)より。 ### ### Jouni Helske (2014). KFAS: Kalman Filter and Smoother for ### Exponential Family State Space Models. ### R package version 1.0.4-1. ### http://CRAN.R-project.org/package=KFAS ### ## KFASとggplot2を使用 library(KFAS) library(ggplot2) ## データにはSeatbeltsを使用 data(Seatbelts) ## モデル定義 ## VanKilled: バン運転手の死者数 ## law: シートベルト義務化の前後をしめす変数 model.van <- SSModel(VanKilled ~ law + SSMtrend(degree = 1, Q = list(matrix(NA))) + SSMseasonal(period = 12, sea.type = "dummy", Q = NA), data = Seatbelts, distribution = "poisson") ## 分散Qを最尤推定 fit.van <- fitSSM(model = model.van, inits = c(-4, -7, 2)) ## カルマンスムーザー適用と、トレンドおよび回帰の状態のとりだし out.van <- KFS(fit.van$model, smoothing=c("state")) sig.van <- signal(out.van, states = c("trend", "regression")) p <- ggplot(data.frame(Year = seq(start(Seatbelts)[1], end(Seatbelts)[1] + 11/12, 1 / 12), VanKilled = c(Seatbelts[, "VanKilled"]), Smooth = exp(c(sig.van$signal)))) p + geom_point(aes(x = Year, y = VanKilled)) + geom_line(aes(x = Year, y = VanKilled)) + geom_line(aes(x = Year, y = Smooth), colour = "gray35", size = 1.2) + ylab("No. of van drivers") + theme_bw(12, "Helvetica")
結果
タグ:R




コメント 0