R: 時系列データ間の関係を状態空間モデルでみる (2) [統計]
きのうのつづき。今度は本当に関係のある場合。
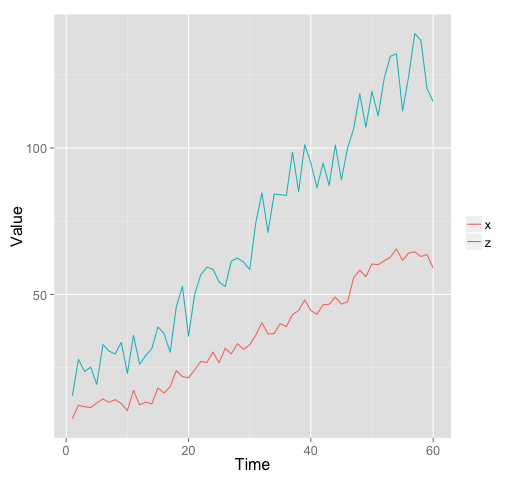
zは、xを2倍してノイズをくわえた値とする。
## zはxから生成
z <- rnorm(N.t, x * 2, 8)
df2 <- data.frame(time = 1:N.t, x = x, z = z)
p2 <- ggplot(df2)
p2 + geom_line(aes(x = rep(time, 2), y = c(x, z),
color = rep(c("x", "z"), each = N.t))) +
xlab("Time") + ylab("Value") +
guides(color = guide_legend(title = "")) +
theme_gray(base_size = 16)
p2 + geom_point(aes(x = x, y = z)) +
theme_gray(base_size = 16)
グラフ
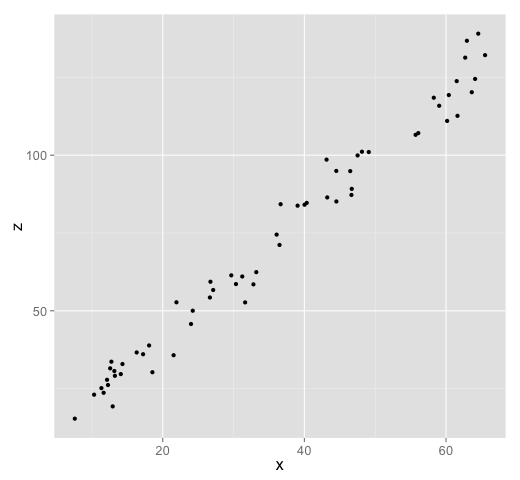
相関をみてみる。
> cor.test(x, z)
Pearson's product-moment correlation
data: x and z
t = 30.4594, df = 58, p-value < 2.2e-16
alternative hypothesis: true correlation is not equal to 0
95 percent confidence interval:
0.9503121 0.9821228
sample estimates:
cor
0.9701356
model3はxとの回帰をふくめないトレンドモデル、model4はxとの回帰をふくめたトレンドモデルとする。
model3 <- SSModel(z ~ SSMtrend(degree = 2,
Q = list(matrix(NA), matrix(NA))),
data = df2, H = matrix(NA))
fit3 <- fitSSM(model3, inits = c(1, 1, 1, 1))
out3 <- KFS(fit3$model, smoothing = c("state", "mean"))
model4 <- SSModel(z ~ x + SSMtrend(degree = 2,
Q = list(matrix(NA), matrix(NA))),
data = df2, H = matrix(NA))
fit4 <- fitSSM(model4, inits = c(1, 1, 1, 1))
out4 <- KFS(fit4$model, smoothing = c("state", "mean"))
time n = 60のときの状態。model4でのxの係数の推定値は1.2355、標準誤差は0.3017なので、Wald統計量は4.095 (> 1.96)。
> print(out3)
Smoothed values of states and standard errors at time n = 60:
Estimate Std. Error
level 129.9667 2.9735
slope 1.9496 0.1596
> print(out4)
Smoothed values of states and standard errors at time n = 60:
Estimate Std. Error
x 1.2355 0.3017
level 48.6311 20.0419
slope 0.7346 0.3173
尤度比検定では、xの効果は有意にあることとなった。
> 1 - pchisq(-2 * (out3$logLik - out4$logLik), df = 1) [1] 0.0003130087




コメント 0